上一篇写到了获取DHT11的数据,这次我们要通过MQTT下发指令,解析后获取DHT11传感器数据后,通过MQTT发送到服务端。
准备工作
模块联网请参考前面的文章,MQTT服务端需要提前准备好,我们假设通过两个TOPIC来实现命令监听和数据发布:
命令监听TOPIC:b'cat/esp32/01'
数据发送TOPIC:b'iot/esp32/01'
参考代码
1 | import utime |
实测
MQTT发送指令(并通过另外的TOPIC返回数据):
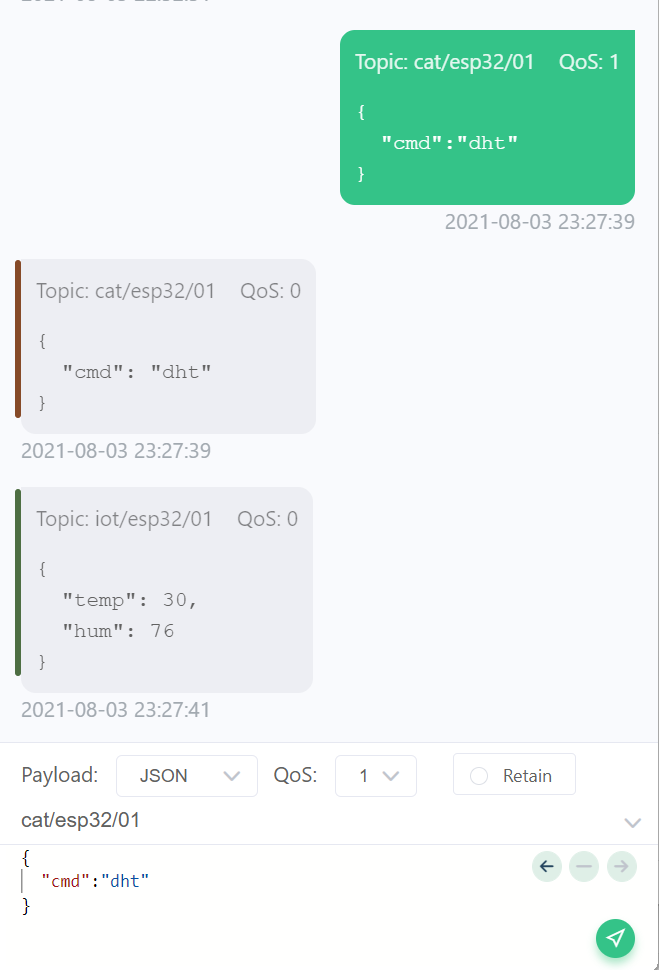
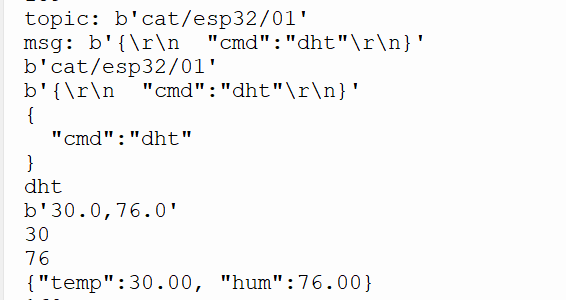
模块接收到指令并获取数据后发送:
上一篇写到了获取DHT11的数据,这次我们要通过MQTT下发指令,解析后获取DHT11传感器数据后,通过MQTT发送到服务端。
模块联网请参考前面的文章,MQTT服务端需要提前准备好,我们假设通过两个TOPIC来实现命令监听和数据发布:
命令监听TOPIC:b'cat/esp32/01'
数据发送TOPIC:b'iot/esp32/01'
1 | import utime |
MQTT发送指令(并通过另外的TOPIC返回数据):
模块接收到指令并获取数据后发送:

